贪心算法
前面我们讲到的动态规划一般解决的都是最优问题,通常情况下我们先将原问题拆分成数个子问题,然后找出这些子问题之间的关系,即怎样从规模为 n - 1 的子问题的解中得出规模为 n 的子问题的解(F(n-1) –> F(n)),最后从最小子问题入手,用迭代的方式求出原问题的解。这样虽然每次都能求出最优解,并且这里的最优是全局最优,但是动态规划的方法过于复杂,难以理解,而且需要额外的内存空间来储存子问题的解。在一些只需要近似最优解的场景中,动态规划未免显得有点头重脚轻了。因此,我们就有了贪心算法,它能帮助我们找出近似的解。

贪心算法(greedy algorithm)顾名思义就是算法采用贪心的策略,来解决一些复杂的问题。一个最简单的例子就是找零钱问题,假设有面值为 5 元,2 元,1 元的钱币,怎样凑出金额为 6 元的零钱,使得用到的钱币数最少,用动态规划的方法来计算的话,我们得到最少需要 2 枚钱币(5 元和 1 元)。但是如果我们采用贪心算法的策略,每次选择钱币金额最大的,使子问题的规模尽可能的变小,我们同样能够得到 5 元和 1 元的组合。

那么贪心算法真的就能解决所有的最优化问题吗?我们将钱币面值稍稍做一点改动,变为 4 元,3 元 和 1 元(仅仅是假设啦),找零钱的金额还是 6 元。如果采用贪心的策略,我们先选择 4 元的,然后剩下的 2 元用两个 1 元组合而成,就需要 3 枚钱币,而实际上我们只需要两个 3 元就可以凑齐 6 元。因此,贪心算法并不是在所有的情况下都能有最优解。
最小生成树
下面就来看看用贪心算法来解决具体的问题。我们从图入手,介绍两种最小生成树的算法:普林姆算法和克鲁斯卡尔算法。首先来介绍一下什么是生成树。
下图中每一个节点代表一个村庄,有一些路使这些村庄之间彼此相互连接,也就是图中的每条边,现在要将这些路拓宽,但由于受到预算的限制,不能覆盖所有的路,只能选择一部分拓宽,但要使拓宽的路将所有的村庄连通。换句话说,从任何一个村庄出发都能够到达其他的村庄。
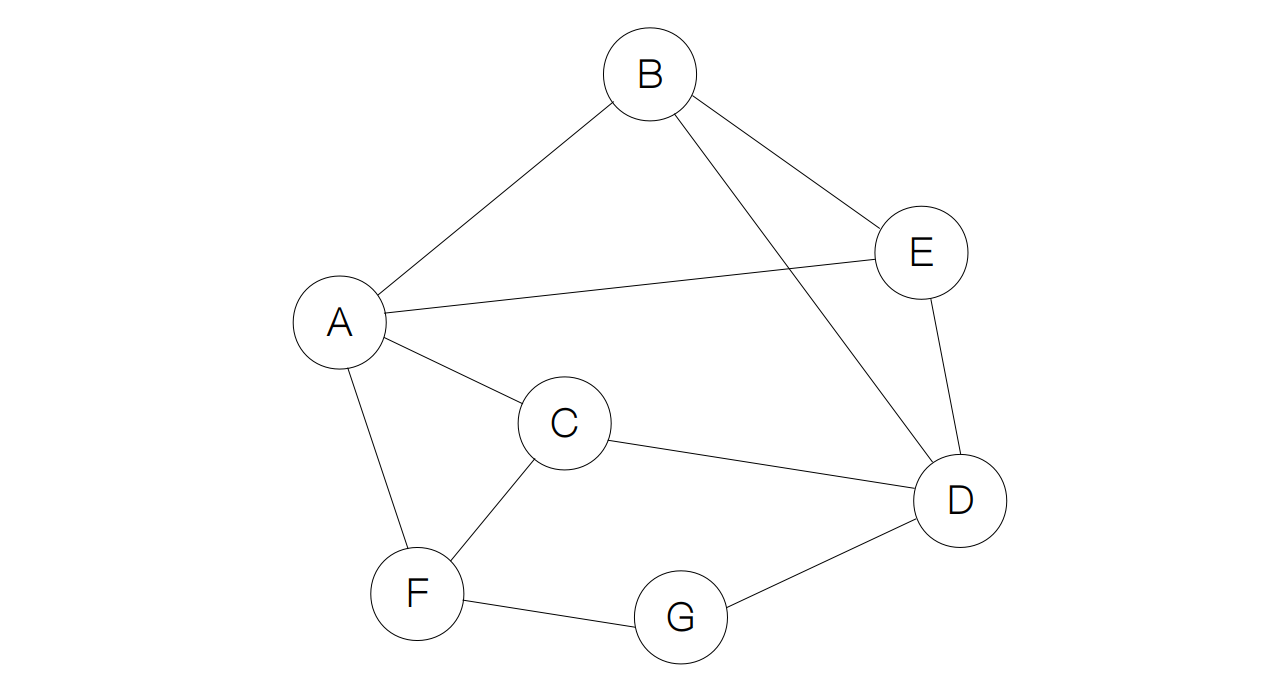
生成树就是在图中,由边的子集所构成的树,并且满足全部节点都被包括在内。在上面的例子中,我们可以画出不止一种生成树。
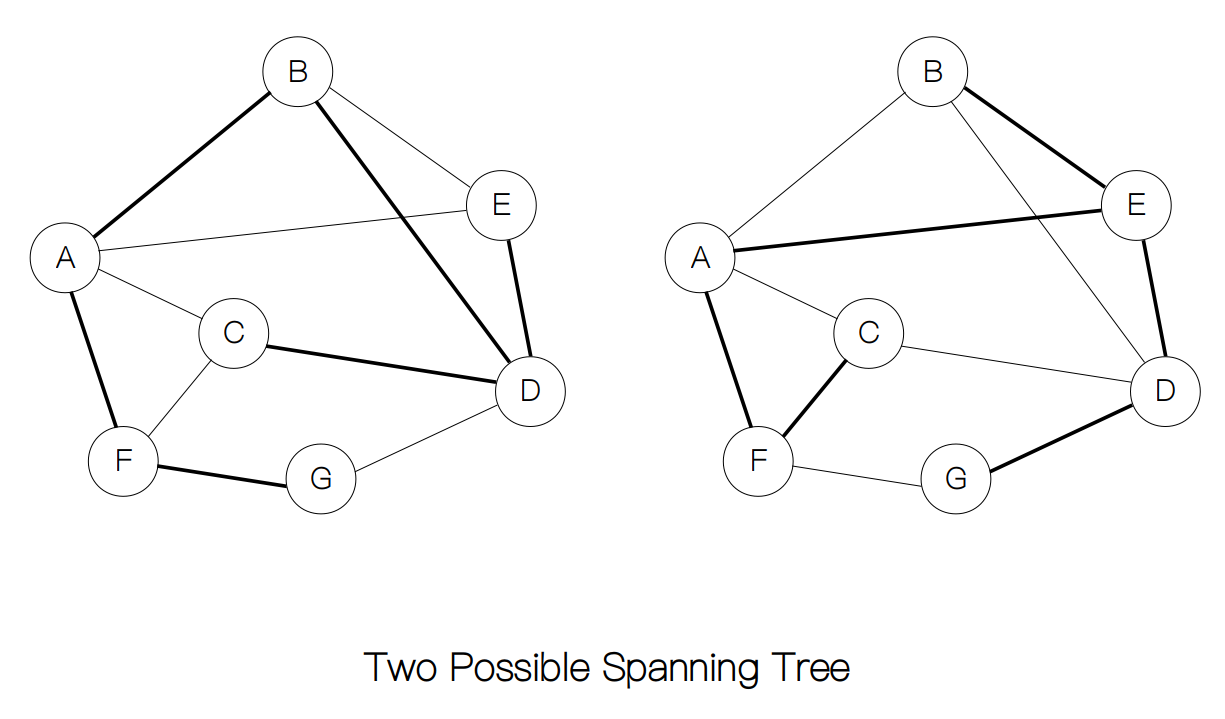
假设村庄的拓宽道路的预算被进一步地缩减,需要用最少的材料来修路,这种情况下又怎么办呢?如果村庄间的距离已知,那么只需要计算上面的生成树中每一条边的权重进行求和,选择最小的即可。
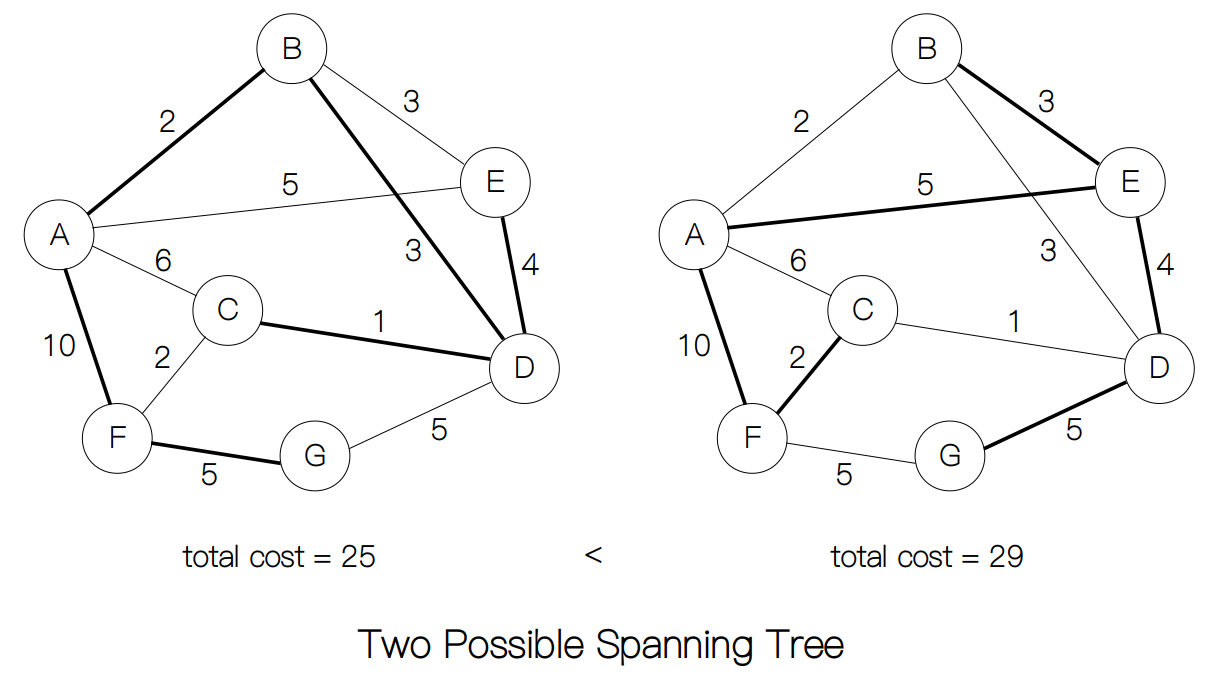
但每次都把生成树求出来,计算它们的权重的总和,然后选最小者这种方法太低效了,如果我们采用贪心策略,问题就要好办许多。
普林姆算法
根据上面的例子,我们来讲一讲普林姆算法的全过程,它正是采用的贪心策略。假设我们有图 G = <V, E>,整个过程需要用到 5 步。
- 第一步:初始化集合 Vvisited = {},Eweight = {} 和 Etarget = {},并从图中选择一个起始节点 x,标记为已访问,加入到集合 Vvisited 。
- 第二步:将所有未被访问的边 (u, v) 放入到集合 Eweight 中,并标记为已访问。
- 第三步:从集合 Eweight 中取出最小的边 (u, v), 如果 v 为被访问,执行第三步;如果没有被访问,执行第四步。
- 第四步:把 v 标记为已访问,并将 v 放入到集合 Vvisited 中,将边 (u, v) 放入到集合 Etarget 中。
- 第五步:重复第三步,直到 Vvisited = V。
在写出普林姆算法之前,我们先定义Vertex类和Edge类来表示节点和边:
class Vertex(object):
def __init__(self, name):
self.name = name
self.neighbours = []
self.visited = False
class Edge(object):
def __init__(self, pre, next, weight):
self.pre = pre
self.next = next
self.visited = False
self.weight = weight
在第二步和第三步中我们发现,每次都会返回一个最小权重边,因此会用到堆来实现优先队列的过程,这样每次权重最小的边都位于堆顶。这里我们用到两个函数fix_up和fix_down来分别向上和向下调整堆的结构。
def fix_up(queue):
temp_idx = len(queue) - 1
parent_idx = (temp_idx - 1) // 2
heap = False
while not heap and parent_idx >= 0:
# 判断是否满足堆的性质
if queue[temp_idx].weight < queue[parent_idx].weight:
queue[temp_idx], queue[parent_idx] = queue[parent_idx], queue[temp_idx]
else:
heap = True
# 更新索引值
temp_idx = parent_idx
parent_idx = (temp_idx - 1) // 2
def fix_down(queue):
temp_idx = 0; size = len(queue)
temp_ver = queue[temp_idx] # 暂存当前节点
heap = False
while not heap and 2 * temp_idx + 1 < size:
j = 2 * temp_idx + 1 # 左孩子的索引
# 右孩子存在
if j < size - 1:
# 比较两个节点的权重
if queue[j].weight > queue[j + 1].weight:
j = j + 1
# 判断是否满足堆的性质
if queue[j].weight >= temp_ver.weight:
heap = True
else:
queue[temp_idx] = queue[j]
temp_idx = j # 更新 temp_idx
queue[temp_idx] = temp_ver
有了堆的结构之后,我们就很容易写出主函数Prim了。
def Prim(G, source):
V, _ = G # 从 G 中获取节点集合和边集合
v_set = V
pqueue = [] # 建立优先队列
source.visited = True; v_set.remove(source); cur = source
total_cost = 0
while v_set:
for e in cur.neighbours:
if not e.visited:
e.visited = True
pqueue.append(e) # 将 e 加入到堆
fix_up(pqueue)
pqueue[0], pqueue[-1] = pqueue[-1], pqueue[0]
temp = pqueue.pop() # 删除堆顶元素
fix_down(pqueue)
if not temp.pre.visited:
cur = temp.pre
elif not temp.next.visited:
cur = temp.next
else:
continue # 下一个节点已被访问
cur.visited = True
print(temp.pre.name + '--' + temp.next.name)
total_cost += temp.weight
v_set.remove(cur)
return total_cost
我们用一张动图来表示普林姆算法的整个过程。
最后,我们来计算一下复杂度。每当一个元素加入到堆中或从堆顶中删除,时间复杂度为都为 Θ(log(|V|)),普林姆算法需要将每一个边加入到堆中,所以建堆的时间复杂度为 Θ(|E|log|V|)。而生成树最少需要 |V| - 1 条边来构成,所以需要执行 |V| - 1 次删除操作(复杂度为 Θ((|V| - 1))log|V|))。最后总的时间复杂度就为 Θ((|V| - 1 + |E|)log|V|)。
→ 本节全部代码 ←
